Development of a Robotic Colonoscopic Manipulation System, Using Haptic Feedback Algorithm
- Affiliations
-
- 1Department of Intelligent Robotics, Hanyang University, Ansan, Korea.
- 2Department of Mechatronics Engineering, Hanyang University, Ansan, Korea.
- 3Department of Electronic Systems Engineering, Hanyang University, Ansan, Korea. bj@hanyang.ac.kr
- 4Department of Internal Medicine and Institute of Gastroenterology, Yonsei University College of Medicine, Seoul, Korea. taeilkim@yuhs.ac
- KMID: 2374199
- DOI: http://doi.org/10.3349/ymj.2017.58.1.139
Abstract
- PURPOSE
Colonoscopy is one of the most effective diagnostic and therapeutic tools for colorectal diseases. We aim to propose a master-slave robotic colonoscopy that is controllable in remote site using conventional colonoscopy.
MATERIALS AND METHODS
The master and slave robot were developed to use conventional flexible colonoscopy. The robotic colonoscopic procedure was performed using a colonoscope training model by one expert endoscopist and two unexperienced engineers. To provide the haptic sensation, the insertion force and the rotating torque were measured and sent to the master robot.
RESULTS
A slave robot was developed to hold the colonoscopy and its knob, and perform insertion, rotation, and two tilting motions of colonoscope. A master robot was designed to teach motions of the slave robot. These measured force and torque were scaled down by one tenth to provide the operator with some reflection force and torque at the haptic device. The haptic sensation and feedback system was successful and helpful to feel the constrained force or torque in colon. The insertion time using robotic system decreased with repeated procedures.
CONCLUSION
This work proposed a robotic approach for colonoscopy using haptic feedback algorithm, and this robotic device would effectively perform colonoscopy with reduced burden and comparable safety for patients in remote site.
Keyword
MeSH Terms
Figure
-

Fig. 1 The slave robot mounted on conventional colonoscope (arrow), and robotic arm (*) holding control body of colonoscope.
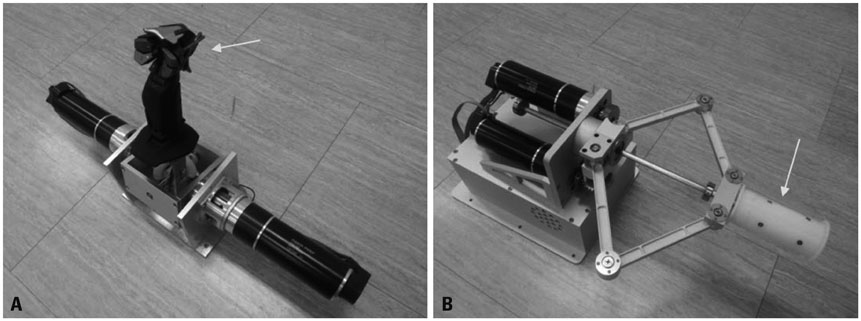
Fig. 2 The devices of master robot. (A) Tilting device, which is comparable to a joystick, for controlling up-down and right-left angulation of endoscopic tip. (B) Insertion and rotation device for controlling insertion, retraction, and rotation of endoscope. The arrow presents handgrip for controlling endoscope.
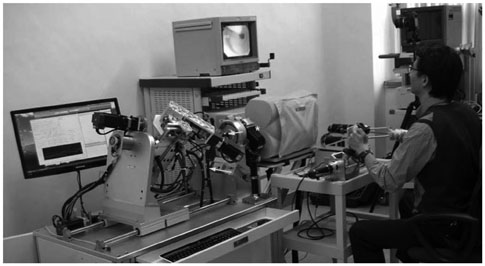
Fig. 3 Performing the colonoscopy using the whole master slave robotic system by a endoscopist (Dr. Tae Il Kim). Mounted colonoscope (arrow) and artificial anus (*) of colonoscope training model.
Cited by 1 articles
-
Robotics for Advanced Therapeutic Colonoscopy
Jennie Y Y Wong, Khek Yu Ho
Clin Endosc. 2018;51(6):552-557. doi: 10.5946/ce.2018.089.
Reference
-
1. Dario P, Ciarletta P, Menciassi A, Kim B. Modeling and experimental validation of the locomotion of endoscopic robots in the colon. Int J Rob Res. 2004; 23:549–556.
Article2. Kim B, Lee S, Park JH, Park JO. Inchworm-like microrobot for capsule endoscope. IEEE Int Conf Robot Biomim. 2005; 10. 24. [Epub]. DOI: 10.10.1109/ROBIO.2004.1521822.
Article3. Kim B, Lim HY, Park JH, Park JO. Inchworm-like colonoscopic robot with hollow body and steering device. JSME Int J Ser C. 2006; 49:205–212.
Article4. Iddan G, Meron G, Glukhovsky A, Swain P. Wireless capsule endoscopy. Nature. 2000; 405:417.
Article5. Lee JS, Kim B, Hong YS. A flexible chain-based screw propeller for capsule endoscopes. Int J Precis Eng Man. 2009; 10:27–34.
Article6. Marescaux J, Leroy J, Gagner M, Rubino F, Mutter D, Vix M, et al. Transatlantic robot-assisted telesurgery. Nature. 2001; 413:379–380.
Article7. Rothstein R, Rosen J, Young JS. Improving efficiency in endoscopy with robotic technology. Gastrointest Endosc Clin N Am. 2004; 14:679–696.
Article8. Lee J, Kang MK, Shin YG. A visibility-based automatic path generation method for virtual colonoscopy. Lect Notes Comput Sci. 2006; 4035:452–459.
Article9. Adams RJ, Hannaford B. Stable haptic interaction with virtual environments. IEEE Trans Rob Autom. 1999; 15:465–474.
Article10. Phee L, Menciassi A, Gorini S, Pernorio G, Arena A, Dario P. An innovative locomotion principle for minirobots moving in the gastrointestinal tract. IEEE Int Conf Robot Autom. 2002; 2:1125–1130.
Article11. Dogramadzi S, Virk GS, Bell GD, Rowland RS, Hancock J. Recording forces exerted on the bowel wall during colonoscopy: in vitro evaluation. Int J Med Robot. 2005; 1:89–97.
Article12. Appleyard MN, Mosse CA, Mills TN, Bell GD, Castillo FD, Swain CP. The measurement of forces exerted during colonoscopy. Gastrointest Endosc. 2000; 52:237–240.
Article13. Najarian S, Fallahnezhad M, Afshari E. Advances in medical robotic systems with specific applications in surgery--a review. J Med Eng Technol. 2011; 35:19–33.
Article14. Chi D, Yan G. From wired to wireless: a miniature robot for intestinal inspection. J Med Eng Technol. 2003; 27:71–76.
Article15. Wang K, Yan G, Ma G, Ye D. An earthworm-like robotic endoscope system for human intestine: design, analysis, and experiment. Ann Biomed Eng. 2009; 37:210–221.
Article16. Kundong W, Guozheng Y, Pingping J, Dongdong Y. A wireless robotic endoscope for gastrointestine. IEEE Trans Robot. 2008; 24:206–210.
Article17. Kume K, Kuroki T, Sugihara T, Shinngai M. Development of a novel endoscopic manipulation system: The Endoscopic operation robot. World J Gastrointest Endosc. 2011; 3:145–150.
Article18. Kume K, Sakai N, Goto T. Development of a novel endoscopic manipulation system: the Endoscopic Operation Robot ver.3. Endoscopy. 2015; 47:815–819.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Lack of Haptic Feedback Is Replaced by More Developed Visual Sense during Robotic Myomectomy
- Robotic surgical systems in urology: What is currently available?
- Effect of Watch-Type Haptic Metronome on the Quality of Cardiopulmonary Resuscitation: A Simulation Study
- Robotic Surgery in the Orthopedic Field
- Robotic surgery for liver, pancreas, and bile duct pathologies: A critical analysis and personal views
