The Evolution of Computer-Assisted Total Hip Arthroplasty and Relevant Applications
- Affiliations
-
- 1Arthroplasty Center, Department of Orthopedic Surgery, Hallym University Dongtan Sacred Heart Hospital, Hwaseong, Korea. jdchangos@gmail.com
- KMID: 2371762
- DOI: http://doi.org/10.5371/hp.2017.29.1.1
Abstract
- In total hip arthroplasty (THA), the accurate positioning of implants is the key to achieve a good clinical outcome. Computer-assisted orthopaedic surgery (CAOS) has been developed for more accurate positioning of implants during the THA. There are passive, semi-active, and active systems in CAOS for THA. Navigation is a passive system that only provides information and guidance to the surgeon. There are 3 types of navigation: imageless navigation, computed tomography (CT)-based navigation, and fluoroscopy-based navigation. In imageless navigation system, a new method of registration without the need to register the anterior pelvic plane was introduced. CT-based navigation can be efficiently used for pelvic plane reference, the functional pelvic plane in supine which adjusts anterior pelvic plane sagittal tilt for targeting the cup orientation. Robot-assisted system can be either active or semi-active. The active robotic system performs the preparation for implant positioning as programmed preoperatively. It has been used for only femoral implant cavity preparation. Recently, program for cup positioning was additionally developed. Alternatively, for ease of surgeon acceptance, semi-active robot systems are developed. It was initially applied only for cup positioning. However, with the development of enhanced femoral workflows, this system can now be used to position both cup and stem. Though there have been substantial advancements in computer-assisted THA, its use can still be controversial at present due to the steep learning curve, intraoperative technical issues, high cost and etc. However, in the future, CAOS will certainly enable the surgeon to operate more accurately and lead to improved outcomes in THA as the technology continues to evolve rapidly.
Figure
-
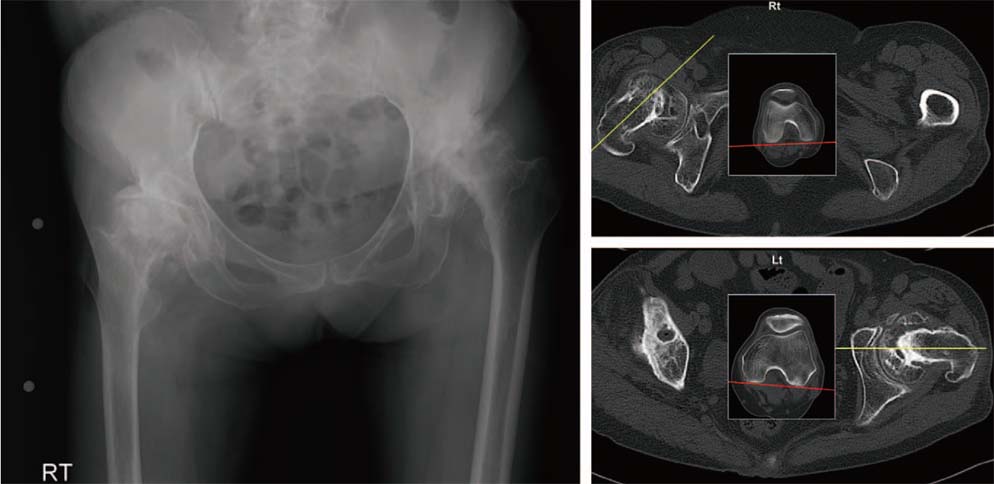
Fig. 1 The femoral anteversion of each side in same patient is different.
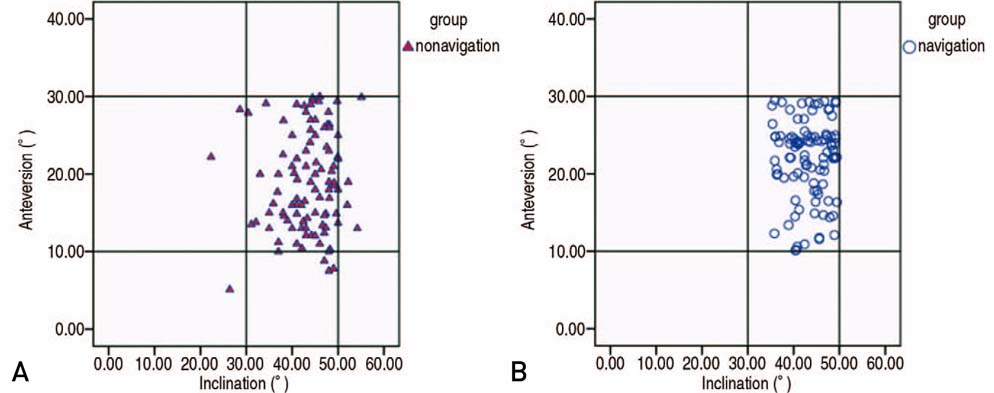
Fig. 2 Outliers of safe zone non-navigated total hip arthroplasty (THA) group and imageless navigation THA group. (A) Ten outliers in non-navigated THA group. (B) No outliers in imageless navigation THA group.
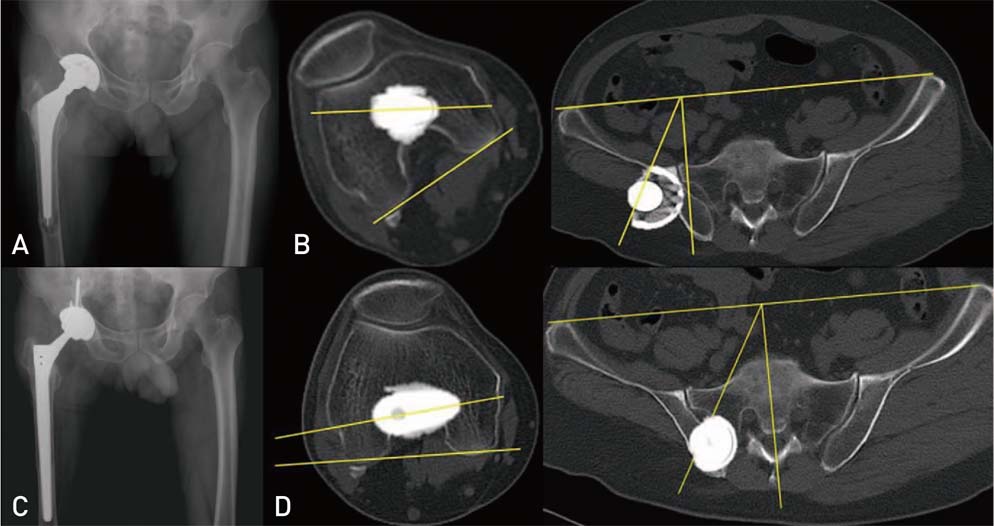
Fig. 3 (A) and (B) Right-sided aseptic implant loosening in a 62-year-old male patient. The preoperative CT shows cup anteversion of 25.1°, stem anteversion of −28.2° (retroversion), and combined anteversion of 5.36°. (C) and (D) The postoperative X-ray and CT show the cup inclination and anteversion, stem anteversion and combined anteversion to be 46.1° and 30.1°, 8.9° and 36.3° respectively.

Fig. 4 Outliers of safe zone post revision total hip arthroplasty (THA) using imageless navigation with the concept of combined anteversion. It shows no outliers after revision THA.
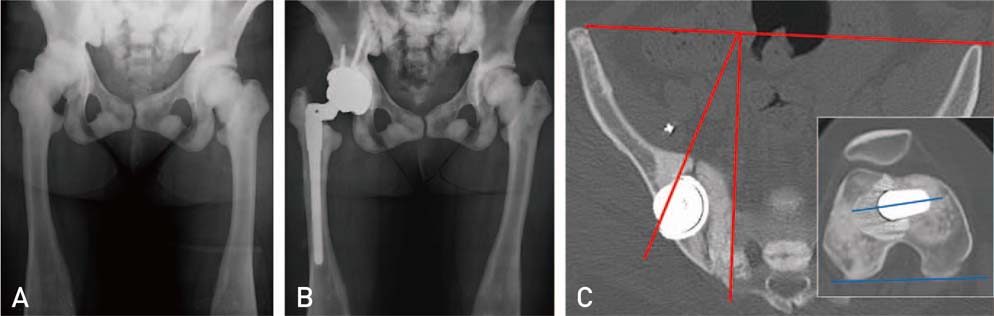
Fig. 5 (A, B) Degenerative osteoarthritis of right hip joint in 26-year-old female with osteopetrosis was treated by total hip arthroplasty using imageless navigation. (C) The postoperative computed tomography shows the cup anteversion, stem anteversion and combined anteversion to be 28.0° and 10.0° and 35.0°, respectively.

Fig. 6 A new method of registration in navigated hip arthroplasty without the need to register the anterior pelvic plane. (A) Landmarks used for lateral positon, (B) landmarks used for supine positon. * Reused from the article of Davis ET, et al. (J Arthroplasty. 2015;30:55-60)

Fig. 7 Preoperative check of impingement, leg length, and offset after cup and stem planning in computed tomography-based navigation.

Fig. 8 Robot-assisted total hip arthroplasty for the cup positioning using TSolution One® system. TCAT ™ is positioned according to the pre-operatively planned orientation of the cup. (A) Schematic drawing and (B) photograph from operation field.
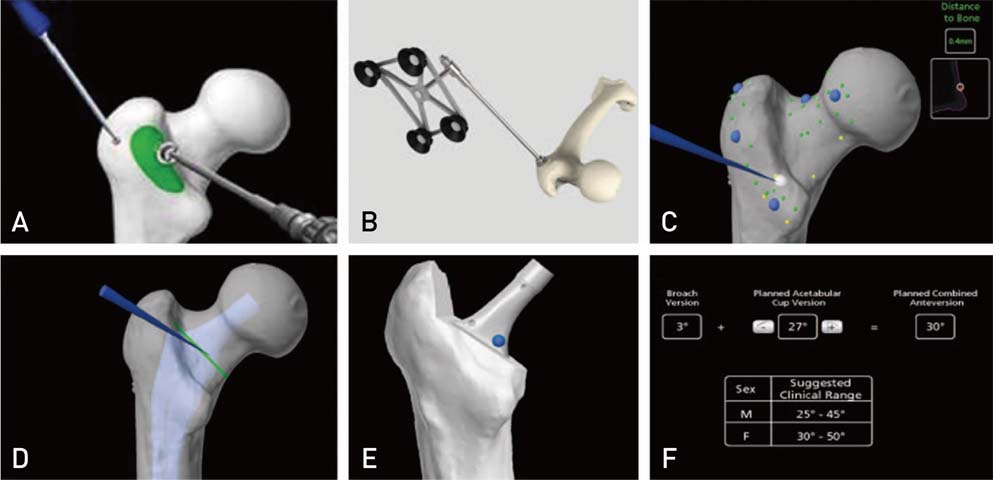
Fig. 9 Enhanced femoral workflow in MAKOplasty® System. (A) Femoral array screw placement and checkpoint, (B) femoral array placement, (C) femur registration & verification, (D) guided femoral neck resection, (E) stem version check, and (F) combined anteversion check.
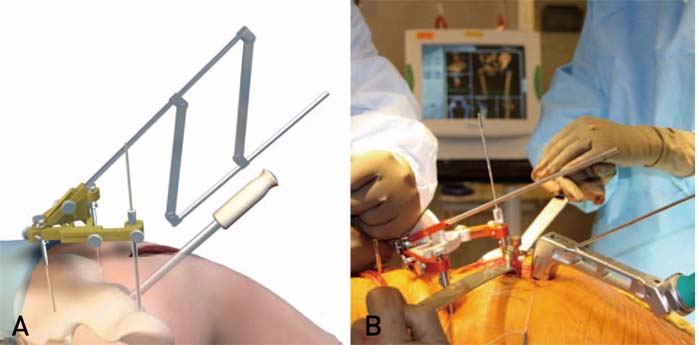
Fig. 10 Computer-assisted mechanical navigation system (HipSextant™). (A) Schematic drawing and (B) photograph from operation field.
Reference
-
1. Chang JD. Foreword. J Arthroplasty. 2014; 29:2235.
Article2. DiGioia AM, Jaramaz B, Blackwell M, et al. The Otto Aufranc Award. Image guided navigation system to measure intraoperatively acetabular implant alignment. Clin Orthop Relat Res. 1998; (355):8–22.3. Callanan MC, Jarrett B, Bragdon CR, et al. The John Charnley Award: risk factors for cup malpositioning: quality improvement through a joint registry at a tertiary hospital. Clin Orthop Relat Res. 2011; 469:319–329.
Article4. Eilander W, Harris SJ, Henkus HE, Cobb JP, Hogervorst T. Functional acetabular component position with supine total hip replacement. Bone Joint J. 2013; 95-B:1326–1331.
Article5. DiGioia AM, Hafez MA, Jaramaz B, Levison TJ, Moody JE. Functional pelvic orientation measured from lateral standing and sitting radiographs. Clin Orthop Relat Res. 2006; 453:272–276.
Article6. Lembeck B, Mueller O, Reize P, Wuelker N. Pelvic tilt makes acetabular cup navigation inaccurate. Acta Orthop. 2005; 76:517–523.
Article7. Babisch JW, Layher F, Amiot LP. The rationale for tilt-adjusted acetabular cup navigation. J Bone Joint Surg Am. 2008; 90:357–365.
Article8. Sugano N. Computer-assisted orthopaedic surgery and robotic surgery in total hip arthroplasty. Clin Orthop Surg. 2013; 5:1–9.
Article9. Nishihara S, Sugano N, Nishii T, Ohzono K, Yoshikawa H. Measurements of pelvic flexion angle using three-dimensional computed tomography. Clin Orthop Relat Res. 2003; (411):140–151.
Article10. Ranawat CS, Ranawat AS, Lipman JD, White PB, Meftah M. Effect of spinal deformity on pelvic orientation from standing to sitting position. J Arthroplasty. 2016; 31:1222–1227.
Article11. Suzuki H, Inaba Y, Kobayashi N, Ishida T, Ike H, Saito T. Postural and chronological change in pelvic tilt five years after total hip arthroplasty in patients with developmental dysplasia of the hip: A three-dimensional analysis. J Arthroplasty. 2016; 31:317–322.
Article12. Tamura S, Takao M, Sakai T, Nishii T, Sugano N. Spinal factors influencing change in pelvic sagittal inclination from supine position to standing position in patients before total hip arthroplasty. J Arthroplasty. 2014; 29:2294–2297.
Article13. Esposito CI, Miller TT, Kim HJ, et al. Does degenerative lumbar spine disease influence femoroacetabular flexion in patients undergoing total hip arthroplasty? Clin Orthop Relat Res. 2016; 474:1788–1797.
Article14. Taki N, Mitsugi N, Mochida Y, Akamatsu Y, Saito T. Change in pelvic tilt angle 2 to 4 years after total hip arthroplasty. J Arthroplasty. 2012; 27:940–944.
Article15. Barsoum WK, Patterson RW, Higuera C, Klika AK, Krebs VE, Molloy R. A computer model of the position of the combined component in the prevention of impingement in total hip replacement. J Bone Joint Surg Br. 2007; 89:839–845.
Article16. Komeno M, Hasegawa M, Sudo A, Uchida A. Computed tomographic evaluation of component position on dislocation after total hip arthroplasty. Orthopedics. 2006; 29:1104–1108.
Article17. Dorr LD, Malik A, Dastane M, Wan Z. Combined anteversion technique for total hip arthroplasty. Clin Orthop Relat Res. 2009; 467:119–127.
Article18. Ranawat CS, Maynard MJ. Modern techniques of cemented total hip arthroplasty. Tech Orthop. 1991; 6:17–25.19. Widmer KH, Zurfluh B. Compliant positioning of total hip components for optimal range of motion. J Orthop Res. 2004; 22:815–821.
Article20. Sendtner E, Müller M, Winkler R, Wörner M, Grifka J, Renkawitz T. [Femur first in hip arthroplasty--the concept of combined anteversion]. Z Orthop Unfall. 2010; 148:185–190. German.21. Barrack RL. Dislocation after total hip arthroplasty: implant design and orientation. J Am Acad Orthop Surg. 2003; 11:89–99.
Article22. Stefl M, Lundergan W, Heckmann N, et al. Spinopelvic mobility and acetabular component position for total hip arthroplasty. Bone Joint J. 2017; 99-B:1 Supple A. 37–45.
Article23. Nogler M, Kessler O, Prassl A, et al. Reduced variability of acetabular cup positioning with use of an imageless navigation system. Clin Orthop Relat Res. 2004; (426):159–163.
Article24. Dorr LD, Malik A, Wan Z, Long WT, Harris M. Precision and bias of imageless computer navigation and surgeon estimates for acetabular component position. Clin Orthop Relat Res. 2007; 465:92–99.
Article25. Kalteis T, Handel M, Bäthis H, Perlick L, Tingart M, Grifka J. Imageless navigation for insertion of the acetabular component in total hip arthroplasty: is it as accurate as CT-based navigation? J Bone Joint Surg Br. 2006; 88:163–167.26. Najarian BC, Kilgore JE, Markel DC. Evaluation of component positioning in primary total hip arthroplasty using an imageless navigation device compared with traditional methods. J Arthroplasty. 2009; 24:15–21.
Article27. Wixson RL, MacDonald MA. Total hip arthroplasty through a minimal posterior approach using imageless computerassisted hip navigation. J Arthroplasty. 2005; 20:7 Suppl 3. 51–56.
Article28. Yun HH, Yoon JR, Yu JJ, Seo HS. Navigated acetabular cup fixation for acetabular deformity or revision total hip arthroplasty. Hip Pelvis. 2014; 26:150–156.
Article29. Chang JD, Kim IS, Prabhakar S, Mansukhani SA, Lee SS, Yoo JH. Revision total hip arthroplasty using imageless navigation with the concept of combined anteversion. J Arthroplasty. 2016; DOI: 10.1016/j.arth.2016.12.030. Published online December 27.
Article30. Parratte S, Argenson JN. Validation and usefulness of a computer-assisted cup-positioning system in total hip arthroplasty. A prospective, randomized, controlled study. J Bone Joint Surg Am. 2007; 89:494–499.
Article31. Spencer JM, Day RE, Sloan KE, Beaver RJ. Computer navigation of the acetabular component: a cadaver reliability study. J Bone Joint Surg Br. 2006; 88:972–975.32. Kiefer H, Othman A. Ultrasound vs pointer palpation based method in THA navigation: a comparative study. Orthopedics. 2007; 30:10 Suppl. S153–S156.33. Hasart O, Poepplau BM, Asbach P, Perka C, Wassilew GI. Ultrasound-based navigation and 3D CT compared in acetabular cup position. Orthopedics. 2009; 32:10 Suppl. 6–10.
Article34. Davis ET, Schubert M, Wegner M, Haimerl M. A new method of registration in navigated hip arthroplasty without the need to register the anterior pelvic plane. J Arthroplasty. 2015; 30:55–60.
Article35. Lee JY, Song JH, Kim CJ. Do you need CAOS (Computer Assisted Orthopedic Surgery) in THA?: from a negative perspective. J Korean Hip Soc. 2011; 23:103–107.
Article36. Jaramaz B, DiGioia AM 3rd, Blackwell M, Nikou C. Computer assisted measurement of cup placement in total hip replacement. Clin Orthop Relat Res. 1998; (354):70–81.
Article37. Jolles BM, Genoud P, Hoffmeyer P. Computer-assisted cup placement techniques in total hip arthroplasty improve accuracy of placement. Clin Orthop Relat Res. 2004; (426):174–179.
Article38. Sugano N, Takao M, Sakai T, Nishii T, Miki H. Does CT-based navigation improve the long-term survival in ceramicon-ceramic THA? Clin Orthop Relat Res. 2012; 470:3054–3059.
Article39. Haaker R, Tiedjen K, Rubenthaler F, Stockheim M. [Computer-assisted navigated cup placement in primary and secondary dysplastic hips]. Z Orthop Ihre Grenzgeb. 2003; 141:105–111. German.
Article40. Tannast M, Langlotz F, Kubiak-Langer M, Langlotz U, Siebenrock KA. Accuracy and potential pitfalls of fluoroscopy-guided acetabular cup placement. Comput Aided Surg. 2005; 10:329–336.
Article41. Gandhi R, Marchie A, Farrokhyar F, Mahomed N. Computer navigation in total hip replacement: a meta-analysis. Int Orthop. 2009; 33:593–597.
Article42. Moskal JT, Capps SG. Acetabular component positioning in total hip arthroplasty: an evidence-based analysis. J Arthroplasty. 2011; 26:1432–1437.
Article43. Xu K, Li YM, Zhang HF, Wang CG, Xu YQ, Li ZJ. Computer navigation in total hip arthroplasty: a meta-analysis of randomized controlled trials. Int J Surg. 2014; 12:528–533.
Article44. Liu Z, Gao Y, Cai L. Imageless navigation versus traditional method in total hip arthroplasty: A meta-analysis. Int J Surg. 2015; 21:122–127.
Article45. Bargar WL, Bauer A, Börner M. Primary and revision total hip replacement using the Robodoc system. Clin Orthop Relat Res. 1998; (354):82–91.
Article46. Taylor RH, Joskowicz L, Williamson B, et al. Computer-integrated revision total hip replacement surgery: concept and preliminary results. Med Image Anal. 1999; 3:301–319.
Article47. Honl M, Dierk O, Gauck C, et al. Comparison of robotic-assisted and manual implantation of a primary total hip replacement. A prospective study. J Bone Joint Surg Am. 2003; 85-A:1470–1478.48. Hananouchi T, Sugano N, Nishii T, et al. Effect of robotic milling on periprosthetic bone remodeling. J Orthop Res. 2007; 25:1062–1069.
Article49. Hagio K, Sugano N, Takashina M, Nishii T, Yoshikawa H, Ochi T. Effectiveness of the ROBODOC system in preventing intraoperative pulmonary embolism. Acta Orthop Scand. 2003; 74:264–269.
Article50. Nakamura N, Sugano N, Nishii T, Kakimoto A, Miki H. A comparison between robotic-assisted and manual implantation of cementless total hip arthroplasty. Clin Orthop Relat Res. 2010; 468:1072–1081.
Article51. Lim SJ, Ko KR, Park CW, Moon YW, Park YS. Robot-assisted primary cementless total hip arthroplasty with a short femoral stem: a prospective randomized short-term outcome study. Comput Aided Surg. 2015; 20:41–46.
Article52. Nogler M, Krismer M, Haid C, Ogon M, Bach C, Wimmer C. Excessive heat generation during cutting of cement in the Robodoc hip-revision procedure. Acta Orthop Scand. 2001; 72:595–599.
Article53. Nishihara S, Sugano N, Nishii T, Miki H, Nakamura N, Yoshikawa H. Comparison between hand rasping and robotic milling for stem implantation in cementless total hip arthroplasty. J Arthroplasty. 2006; 21:957–966.
Article54. Barrett AR, Davies BL, Gomes MP, et al. Computer-assisted hip resurfacing surgery using the acrobot navigation system. Proc Inst Mech Eng H. 2007; 221:773–785.
Article55. Dorr LD, Jones RE, Padgett DE, Pagnano M, Ranawat AS, Trousdale RT. Robotic guidance in total hip arthroplasty: the shape of things to come. Orthopedics. 2011; 34:e652–e655.
Article56. Nawabi DH, Conditt MA, Ranawat AS, et al. Haptically guided robotic technology in total hip arthroplasty: a cadaveric investigation. Proc Inst Mech Eng H. 2013; 227:302–309.
Article57. Domb BG, El Bitar YF, Sadik AY, Stake CE, Botser IB. Comparison of robotic-assisted and conventional acetabular cup placement in THA: a matched-pair controlled study. Clin Orthop Relat Res. 2014; 472:329–336.
Article58. Redmond JM, Gupta A, Hammarstedt JE, Petrakos AE, Finch NA, Domb BG. The learning curve associated with robotic-assisted total hip arthroplasty. J Arthroplasty. 2015; 30:50–54.
Article59. Radermacher K, Portheine F, Anton M, et al. Computer assisted orthopaedic surgery with image based individual templates. Clin Orthop Relat Res. 1998; (354):28–38.
Article60. Hananouchi T, Saito M, Koyama T, et al. Tailor-made surgical guide based on rapid prototyping technique for cup insertion in total hip arthroplasty. Int J Med Robot. 2009; 5:164–169.
Article61. Hananouchi T, Saito M, Koyama T, Sugano N, Yoshikawa H. Tailor-made Surgical Guide Reduces Incidence of Outliers of Cup Placement. Clin Orthop Relat Res. 2010; 468:1088–1095.
Article62. Zhang YZ, Chen B, Lu S, et al. Preliminary application of computer-assisted patient-specific acetabular navigational template for total hip arthroplasty in adult single development dysplasia of the hip. Int J Med Robot. 2011; 7:469–474.
Article63. Kunz M, Rudan JF, Xenoyannis GL, Ellis RE. Computer-assisted hip resurfacing using individualized drill templates. J Arthroplasty. 2010; 25:600–606.
Article64. Audenaert E, De Smedt K, Gelaude F, Clijmans T, Pattyn C, Geebelen B. A custom-made guide for femoral component positioning in hip resurfacing arthroplasty: development and validation study. Comput Aided Surg. 2011; 16:304–309.
Article65. Steppacher SD, Kowal JH, Murphy SB. Improving cup positioning using a mechanical navigation instrument. Clin Orthop Relat Res. 2011; 469:423–428.
Article66. Egawa H, Nakano S, Hamada D, Sato R, Yasui N. Total hip arthroplasty in osteopetrosis using computer-assisted fluoroscopic navigation. J Arthroplasty. 2005; 20:1074–1077.
Article67. Gupta A, Redmond JM, Hammarstedt JE, Petrakos AE, Vemula SP, Domb BG. Does robotic-assisted computer navigation affect acetabular cup positioning in total hip arthroplasty in the obese patient? A comparison study. J Arthroplasty. 2015; 30:2204–2207.
Article68. Miki H, Kyo T, Sugano N. Anatomical hip range of motion after implantation during total hip arthroplasty with a large change in pelvic inclination. J Arthroplasty. 2012; 27:1641–1650.e1.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Computer-Assisted Total Hip Arthroplasty
- Do You Need CAOS (Computer Assisted Orthopedic Surgery) in THA?: From a Negative Perspective
- Accurate Leg Length Measurement in Total Hip Arthroplasty: A Comparison of Computer Navigation and a Simple Manual Measurement Device
- Computer Assisted Navigation in Knee Arthroplasty
- An Inguinal Mass associated with Polyethylene Wear Debris after a Total Hip Arthroplasty: A Case Report
